在自动驾驶、智慧城市及智能交通系统快速演进的浪潮中,高精度地图作为核心基础设施之一,其重要性日益凸显。它不仅提供厘米级的道路几何信息,更集成了丰富的语义层(如车道线、交通标志、路缘石等),成为智能系统感知与决策的“超视距传感器”。其发展并非一帆风顺,在计算机软硬件技术开发的推动与制约下,高精度地图正经历着机遇与挑战并存的复杂局面。
一、发展现状:技术融合驱动下的快速迭代
- 数据采集与处理技术的演进:传统的专业采集车搭载激光雷达、摄像头、GNSS/IMU等传感器,成本高昂、效率有限。当前,技术发展正呈现两大趋势:一是传感器小型化、低成本化与高性能化并行,如固态激光雷达和更高性能的视觉传感器的普及;二是众包采集模式的兴起,通过海量普通车辆或智能设备采集数据,结合AI算法进行融合与重建,显著提升了数据鲜度和覆盖范围。在数据处理端,基于深度学习的自动化要素识别、矢量化建模技术已逐步成熟,大幅减少了人工标注的工作量,提升了地图生产效率。
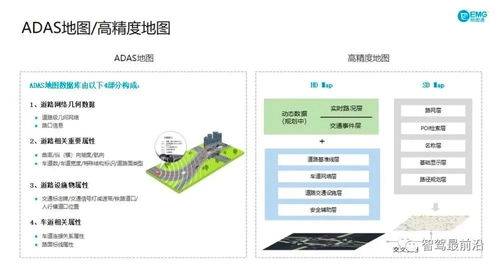
- 地图规格与服务的标准化探索:行业内已形成对高精度地图基本要素(如车道模型、定位图层、动态信息层)的共识。以导航电子地图(NDS)、自动驾驶地图数据格式(ADASIS)等为代表的标准正在推广,旨在解决不同厂商、不同车辆平台之间的数据兼容性问题。云平台与端侧能力的协同成为服务新模式,通过OTA(空中下载技术)实现地图数据的动态更新与分发。
- 软硬件协同的计算架构:高精度地图的应用对车载计算平台提出了极高要求。一方面,需要强大的计算能力(如高算力域控制器)实时处理定位、匹配与融合任务;另一方面,高效的存储与检索算法(如分层、分块索引)以及专为地图优化的硬件(如大容量、高带宽存储芯片)也至关重要。边缘计算与云计算的分工协作,正成为处理海量地图数据与实时需求的关键架构。
二、主要发展瓶颈:技术开发面临的深层挑战
- 数据“鲜度”与覆盖范围的矛盾:高精度地图要求极高的实时性与准确性。道路网络日新月异,传统集中式采集更新模式难以满足全局“鲜度”需求。众包模式虽能提升更新频率,但又带来了数据质量参差不齐、安全与隐私风险、海量数据处理成本激增等新问题。如何在保证精度与安全的前提下,构建高效、低成本的动态更新体系,是软硬件技术共同面临的难题。
- 制图成本与商业模式的困境:高精度地图的采集、生产、维护需要巨大的资本与技术投入。当前,其商业模式仍不清晰,主要依赖向车企或方案商提供授权或服务收费。面对激烈的市场竞争和车企自研地图的趋势,图商面临盈利压力。这反过来制约了在更先进采集设备、更强大AI算法以及更完善云平台等软硬件技术上的持续投入。
- 技术标准与法规的滞后:高精度地图涉及国家安全、个人隐私和数据主权。各国在数据采集(特别是测绘资质)、加密传输、存储与使用等方面的法规差异巨大且尚在完善中,这为技术的全球化开发与应用设置了壁垒。行业技术标准尚未完全统一,导致数据格式、接口、质量评估体系各异,增加了系统集成成本和生态碎片化风险。
- 极端场景与长尾问题的挑战:尽管主流道路场景的制图技术已相对成熟,但在恶劣天气(如大雨、大雪、大雾)、复杂城区环境(如立体交通、无明确标识路段)以及突发临时路况下,传感器的可靠性下降,基于此生成或更新的地图数据质量难以保障。这对传感器的鲁棒性、算法的泛化能力以及多源融合技术提出了极限考验。
- 算力与功耗的平衡难题:在车端,实时的高精度地图定位、匹配与渲染需要消耗大量计算资源,这与汽车电子对低功耗、高可靠性的要求形成矛盾。开发专用芯片(如ASIC、FPGA)或优化算法以提升计算效率、降低功耗,是硬件开发与软件算法协同优化的重要方向,但技术门槛高、研发周期长。
高精度地图的发展将更深度地融入人工智能、云计算、边缘计算和下一代通信技术(如5G/6G)的演进洪流中。突破瓶颈的关键在于软硬件技术的协同创新:通过更智能的AI算法提升数据自动化处理水平与场景适应能力;通过更先进的传感器与计算硬件降低成本、提升性能;通过更完善的云边端架构与行业标准构建高效、安全的动态地图生态。只有跨越这些技术开发上的崇山峻岭,高精度地图才能真正成为赋能全域智能的坚实数字底座。